登录
登录
 注册
注册
康纳尔大学女博士研发可拉伸分布式光纤传感器
病人见不到医生,却能通过一款可穿戴设备,让医生通过屏幕获悉其相关数据;球场上的运动员,戴上这款可穿戴设备,就能实时监测球员数据,教练就能针对性地训练球员;在家干活拧螺丝时,不知道怎么用力?戴上设备并连上电脑,电脑就能告知你用的力气是大是小。
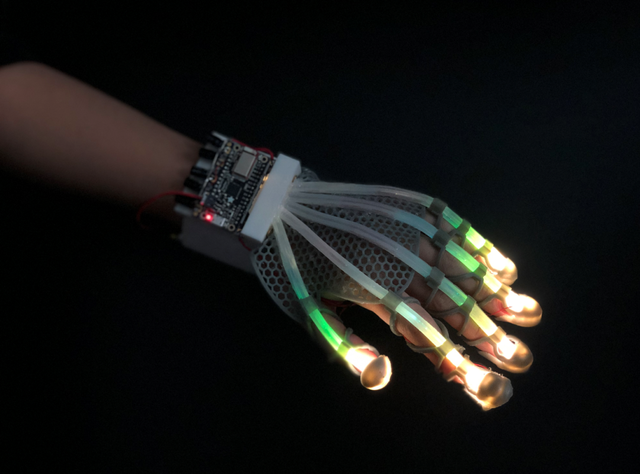
图 | 3D 打印的柔软手套
该设备是一款 3D 打印的柔软手套,它演示了一种由弹性体光导平行组件构成的传感器,相关研究以《可拉伸的分布式光纤传感器》为题发表在 Science 上,由正在康纳尔大学读博的白鹤丹和李硕研发。
27 岁的白鹤丹是该论文一作,她来自辽宁鞍山,自本科起便留学该校,本科时读的双专业:机械工程、运筹学与信息工程,直博期间就读于机械工程专业。

图 | 白鹤丹(来源:受访者)
她告诉 DeepTech,手套只是一个演示,本次研究真正的创新点是光纤传感。目前,业界所有柔性传感器都存在共同的局限性,即只能输出一种信号,但是传感器会有多种形变,这样一对多的关系会导致只根据一种信号,很难判断出形变过程。
而基于二氧化硅的分布式光纤传感器(DFOS,Distributed Fiber Optic Sensing)系统已广泛应用在诸多场景,如检测不可扩展结构中的压力、振动、加速度、温度等。
但是,DFOS 系统与可伸缩电子设备的大型应变并不兼容。基于该痛点,白鹤丹和团队研发出这款传感器,并把其命名为柔性光纤传感器。
通过内部反射和吸收,可拉伸 DFOS 能区分和测量机械变形的位置、大小和模式,如拉伸、弯曲或压制等。以演示可拉伸 DFOS 所具备功能的手套为例,通过可拉伸 DFOS 进行的多位置解耦和多模式变形解耦,该手套能同时重新配置所有类型的手指关节动作和外部按压,并且仅需一个传感器即可实时进行。
在可拉伸 DFOS 系统中,白鹤丹设计了两种彩色染料图案,一种是连续梯度染料图案,可获得单模变形的连续空间分辨率,另一种是离散色块图案,它能用离散空间分辨率去测量和解耦多种变形模式。

图 | 染色图案
为演示该系统的多功能性,白鹤丹主要采用离散色块图案进行设计,并将其命名为可拉伸的多模态传感光导板(SLIMS)。
如下图所示,SLIMS 由两个聚氨酯弹性体芯组成:分别是掺杂了吸收染料的染色芯、和一个不带染料的透明芯。白色发光二极管的一端耦合到染色芯,另一端则放有两个红绿蓝的传感器芯片,其中一个传感器芯片耦合到染色芯,另一个传感器芯片耦合透明芯。通过观察染色芯和透明芯的色度以及强度输出,就能确定目标物变形的位置、大小和模式。
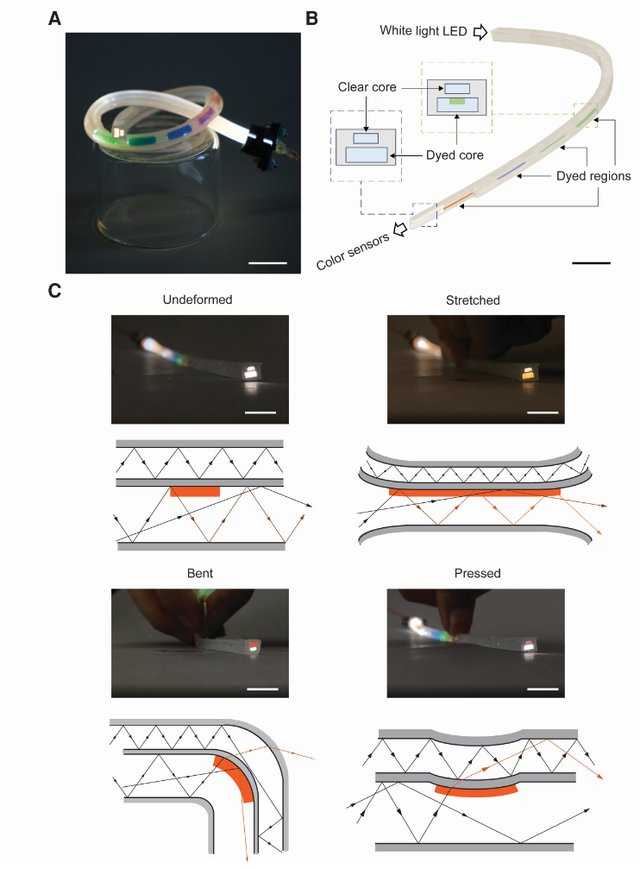
图 | SLIMS 结构
安装在染色芯上的白色发光二极管的视角为 110°,所以来自同一发光二极管的光线也可以进入透明芯,透明芯中掺杂的染料可充当颜色代码,由于染料图案的深度比染色芯低很多,因此很少有光线能以未变形形态穿过染料。当光线未变形时,染色芯和透明芯均呈现出白色。
当染色区域被拉伸时,该区域中的光路长度增加,从而会引起染料更多的吸收,输出的光也会随着相应颜色而变化。根据比尔 - 朗伯特定律( Beer-Lambert law),由于拉伸会增加两个核心的光路,因此两个核心的光输出强度都会降低。
如下图所示,拉伸的多模态传感光导板(SLIMS)的表征表明,随着任何单个染色区域的拉伸,透明芯中无法再观察到色度变化。基于染色芯的衰减,SLIMS 的应变灵敏度在 150%的范围内落在 2 至 5 dBε-1 内伸长(其中 ε 为应变),并能以 0.5 毫米的预应变获得 0.1 毫米的分辨率。
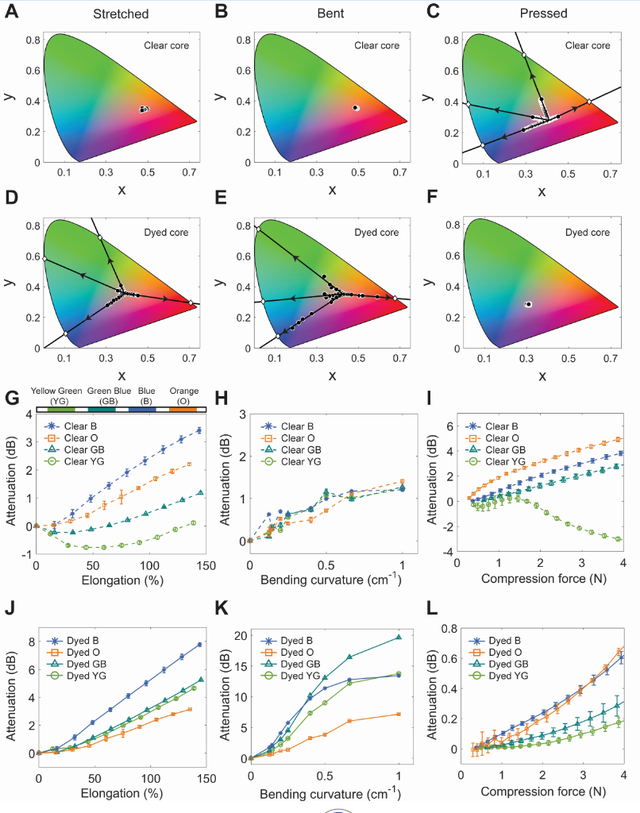
图 | SLIMS 在不同变形模式下的表征
而当染色区域处于弯曲状态时,染色芯中的大多数光线都能穿过染料,输出颜色也会发生变化。某些不能满足临界角的彩色光线,会从染色芯中溢出并进入透明芯中,但是这些光线无法耦合到透明芯,因此透明芯仍然输出白光。
具体来说,四个染色区域每一个都可弯曲到最大 κ= 0.65 cm-1 的曲率,白鹤丹测量了两个芯的色度和强度响应后发现,染色区域弯曲时的颜色响应与拉伸响应类似,透明芯输出保持白色,而染色芯的输出会朝着弯曲染料区域去改变颜色。
由于强度在弯曲中基本不受影响,但会在拉伸中明显衰减,因此上述拉伸和弯曲的区别,可通过比较透明芯的强度输出来实现。通过染色芯的衰减,SLIMS 的弯曲灵敏度为 7 至 24 dBcm-1。
用 3D 打印的柔软手套来演示 SLIMS
为展示上述过程,白鹤丹把 SLIMS 集成到 3D 打印的柔软手套中,手指的近端、中端和远端分别被离散的红蓝绿染料覆盖,此外每个手指仅使用一个定制 SLIMS,该 SLIMS 可以同时捕获三个手指关节的本体感觉、和外部按压的外部感觉。
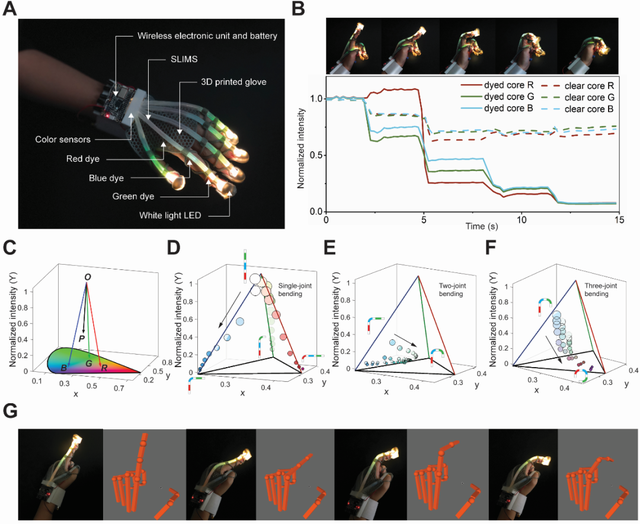
图 | SLIMS 集成的软手套和多关节弯曲的本体感觉
当食指以不同关节角度组合弯曲时,白鹤丹开始从透明芯、和染色芯中收集 RGB 强度的原始数据,当食指近端或中端关节只有一个弯曲时,染色芯会立马从白色变为红色或蓝色,根据颜色变化就能确定关节弯曲位置和角度。
而当多个关节折弯共存时,白鹤丹发现折弯区域开始出现颜色混合,因此需要建立一个数学模型,来消除色度和强度响应方面的差异。
如下图所示,当仅弯曲单个手指关节时,她先在 SLIMS 中测量染色芯的响应,然后对所有三个关节重复上述测量。而为了分离强度响应和色度响应,白鹤丹将 RGB 强度输出转换为 CIE xyY 颜色空间,这样便可实现手套实时执行三个手指关节运动的解耦和重建。
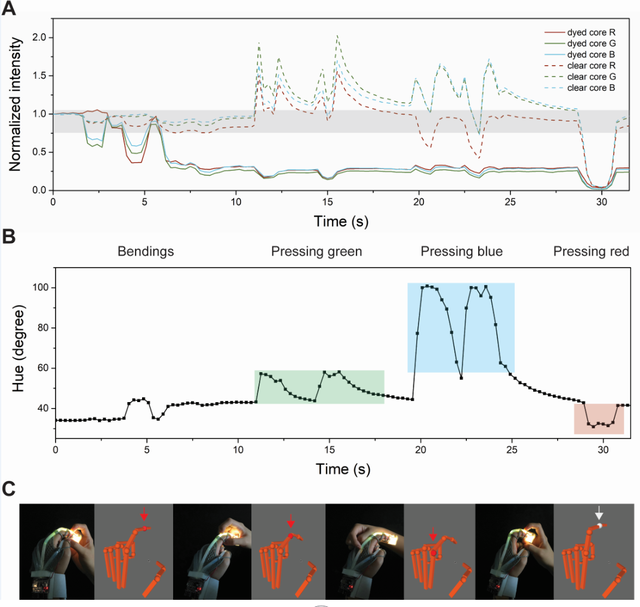
图 | SLIMS 集成的软手套去耦结合了本体感受和外在感受
对于同时进行的外在感受,白鹤丹通过设置透明芯的归一化强度输出的阈值,来实现外部按压与弯曲的解耦,在手指关节弯曲 0 至 10 s 的情况下,强度会略有衰减,当在不同手指关节上按压 SLIMS 10 至 30 s 时,透明芯就会跳跃。
基于此,她将此阈值设置在 0.75 到 1.0 的范围内,当归一化强度超过此范围时,就能确定压力的存在。
为了简化色度表示,她从透明核心输出的 RGB 强度中提取了色相值,压制期间施加的力气大小,也与此色相值成定性比例,当食指在多个位置弯曲时,就能实时重建外部压力的位置和大小。
明年将有相关产品问世
谈及该研究的落地,白鹤丹表示她的导师 Robert F. Shepherd 教授已经有一个创业公司,目前正在基于该研究研发产品,预计明年将推出相关产品。
除用手套检测外界变化之外,他们还能把可拉伸 DFOS 系统缝到衣服上去监测各种信号。
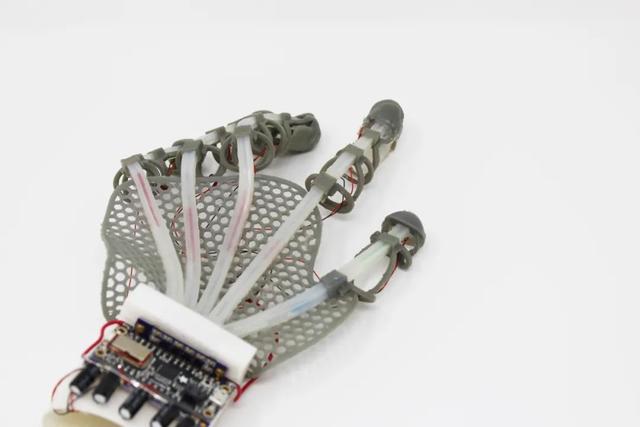
图 | 不发光时的 3D 打印的柔软手套
白鹤丹告诉 DeepTech,以体育数据分析为例,其在美国已经是相对成熟的产业,有些球队联盟通过数据采集和分析来制定战术,进而提高球员训练水平。2011 年,有一部改编自纪实书的电影《点球成金》( Moneyball ), 讲的是一个棒球队用这种方式,用小成本连年赢得MLB(美国职业棒球大联盟)冠军的故事,这也算是美国体育数据分析产业的开端。
但是现在大家更感兴趣的是,如何获取球员的数据,通过这些数据再联系到球员的比赛表现,教练就可以实时地判断谁是好球员,以及球员在哪方面存在问题,从而来制定个性化训练教程。
为保证产品可以真正满足用户需求,白鹤丹专门去采访当地美国棒球联盟的一百多位专业人士,去了解他们的诉求。期间她发现,教练和球员对他们的传感器很感兴趣,一直问是否有相关产品。
目前,白鹤丹已完成康奈尔商业化奖学金项目探索市场,希望借此将团队研发成功产业化。明年她要去美国西北大学柔性电子领域领军人物 John Rogers 组做柔性电子的博后研究,以后准备做教职,同时希望能探索出未来实验成果产业化的可能性。对于这位 27 岁的博士五年级女孩来说,她的路还有很长很长,未来也有无限可能。